Squeaky and Greyhound
Published on April 10, 2023
Servo Squeaky is a 3D printed, open-source quadruped robot developed by the Terrestrial Robotics Engineering and Controls at Virginia Tech. It features a servo-based powertrain that enables high-fidelity walking and crawling.
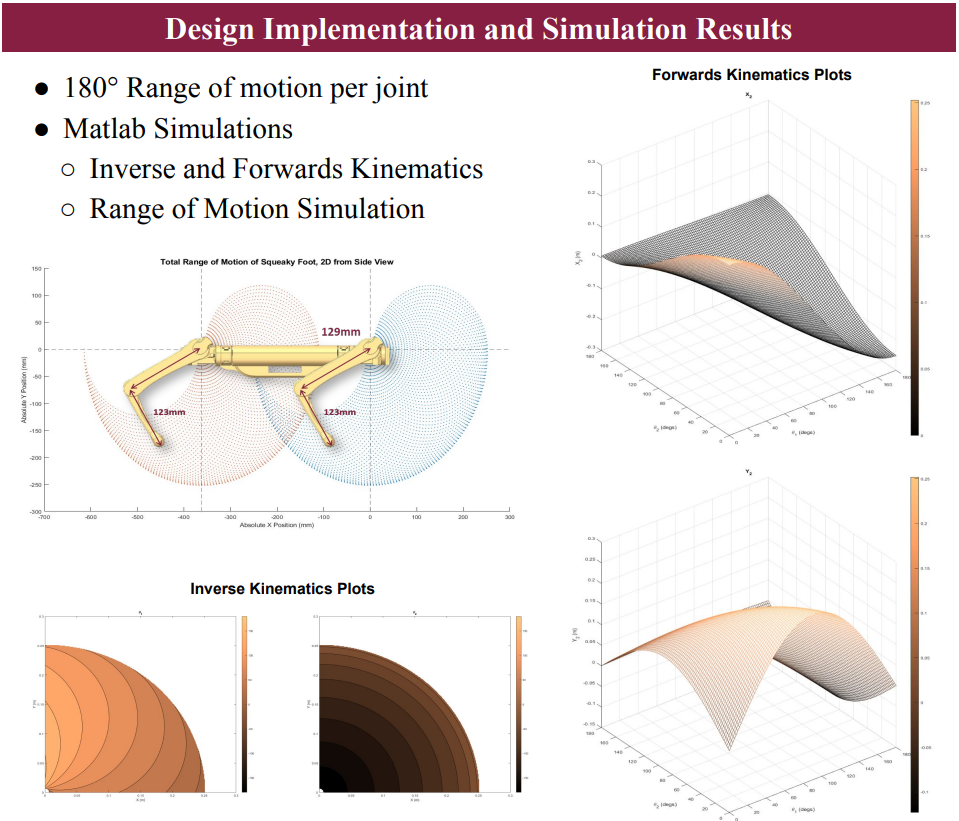
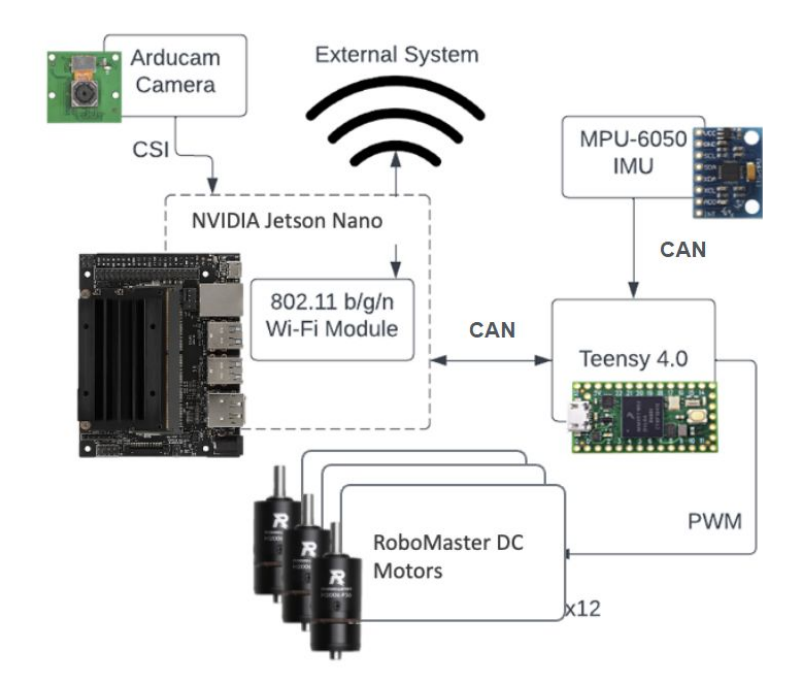
Initially, I redesigned some of Servo Squeaky's mechanical components to make it operational. A video demonstration shows the improved version with a custom inverse kinematics algorithm programmed onto a Teensy microcontroller.
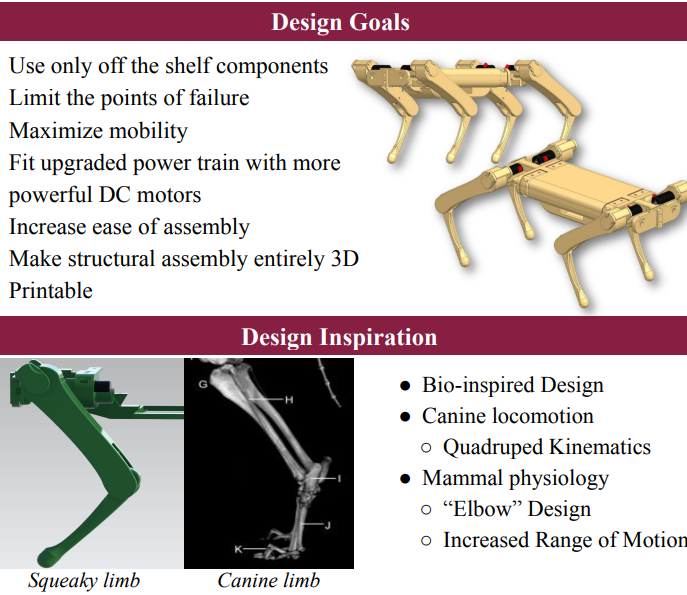
Once the robot was functional, it was handed off to the high-level software team for advanced algorithms. I then focused on creating a new version, dubbed Greyhound, with enhanced mobility—enabling running and jumping.
Greyhound conceals brushless DC motors and 3D printed gearboxes within its legs. A demonstration of the PID control system and the low-level inverse kinematics converting end-effector positions to motor commands is shown below.